Robotik Kaynak Hücrelerinde Verimliliğin Gizli Kahramanı: Pozisyonerler
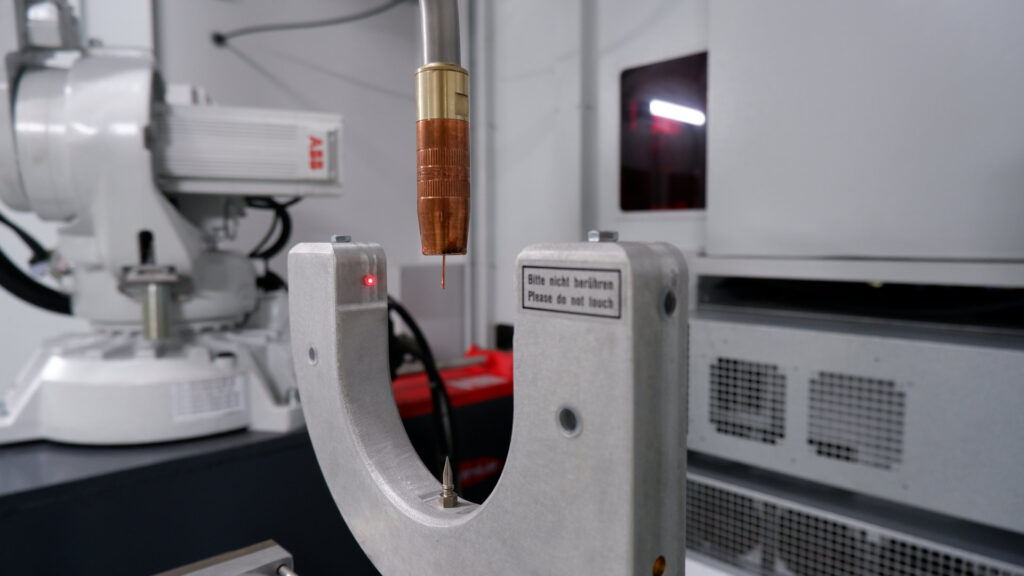
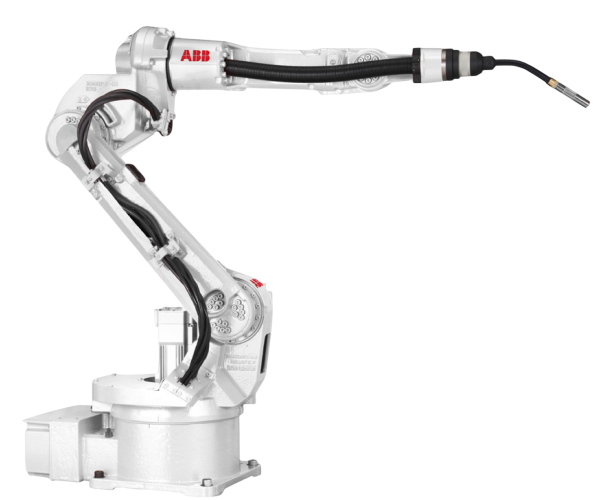
Robotik Kaynak Hücrelerinde Pozisyoner Kullanımı Endüstriyel üretimde robotik otomasyona geçişin temel amacı; hız, standart kalite ve sürdürülebilirliktir. Ancak bir kaynak robotu ne kadar esnek olursa olsun, tek başına her zaman yeterli olmayabilir. Karmaşık geometrili parçalarda robotun erişemediği noktalar veya yerçekimine yenik düşen kaynak açıları devreye girdiğinde, iş parçasını konumlandırma ihtiyacı ortaya çıkar. İşte bu konumlandırıcılara […]
Robotik Kaynak Hücrelerinde Verimliliğin Gizli Kahramanı: Pozisyonerler Read More »