Multimove sistemler bir kabin/hücre içerisinde birden fazla robot ve harici eksen bulunan sistemlerdir. Yalnızca bir kontrolcü ile kullanılmaktadır. Multimove teknolojisi karmaşık işleri daha hızlı yapmaya olanak tanır. Ayrıca büyük iş parçalarına yapılan işlemler içinde sliderlı sistemlere alternatif olarak kullanılabilir. Fikstürsüz üretim yapmak için de ideal sistemlerdir.
Örneğin robotlardan birinin taşıma yapıp parça yerleştirirken diğerinin eş zamanlı olarak tutulan parçaya kaynak yaptığı sistem.
Fotoğraf
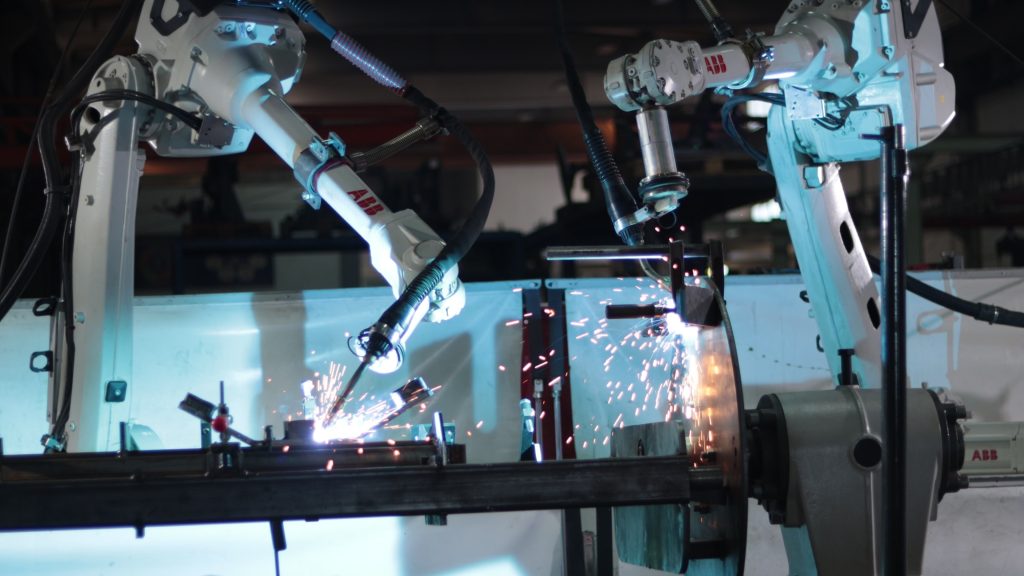
Robotların ikisininde kaynak yaptığı sistem.
Robotları Programla
Tek bir kumandadan robotlar ayrı ayrı kontrol edilebilmektedir. Programlamak 1 robotlu hücrelere göre biraz daha fazla uzmanlık gerektirmektedir. Bu nedenle simülasyon yazılımı kullanmak büyük önem arz etmektedir. Simülasyonda senkronize hareketler tanımlanması, çarpışma testlerinin yapılması ve çevrim süresi hesaplaması büyük önem taşır.
Çalışma Modları (Dual/Single)
Dual/Single Mod isimlendirmesi tyhra’nın yapmış olduğu bir isimlendirmedir. Karşılığı şu şekildedir :
- Single: Yarı Koordine (Semi-Coordinated / Independent)
- Dual: Tam Koordine (Fully Coordinated / Synchronized)
Single modda robotlar ayrı ayrı farklı işler yapmaktadır. Örneğin 1. robot 1. istasyonda kaynak yaparken 2. robotun 2. istasyonda kaynak yapıyor olabilir. Bu modun amacı ilk yatırım maliyetini düşük tutup 2 farklı işi 2 robota yaptırabilmektir.Ancak, programlama sırasında, robot bakıma girdiğinde veya arıza yaparsa sisteme bağlı tüm robotların da duruşa geçeceği unutulmamalıdır.
Multimove sistemlerin asıl gücü Dual moddur. Bu modda 2 robotta koordine şekilde ortak bir işi yapmaktadır. Sisteme bağlı tüm pozisyonerler ve tüm robotlar senkron hareket ettirilebilir. Otomotiv sektöründen örnek verecek olursak robotlardan birisi aracın kapısını tutar diğeri ise kaynağını yapar. Bu işleme Fikstürsüz Kaynak (Jigless Welding) adı verilir. Diğer bir örnek ise, bir fikstüre bağlı şasinin pozisyoner ile çevrilerek iki robot tarafından aynı anda kaynak yapıldığı sistemdir. Burada amaç tek bir robot kolun yapamayacağı işi birden fazla robot kol ile yapabilmeyi sağlamaktır.
Avantajları ve Dezavantajları
Avantajları
- Daha az donanım gerektirir.
- Yüksek hızda imalat yapabilir.
- Fikstürsüz imalatda kalitede ve hızda artış sağlar.
- 1 robotun kapasitesinin yetmeyeceği işi yapabilir.
- Alandan maksimum tasarruf sağlar.
- Tek bir kumandadan tüm sistem kontrol edilebilir.
Dezavantajları
- Programlamak zordur ve uzun sürer
- Tek bir arızada tüm sistem durabilir.
- Manuel program yazarken tüm sistem durur.
Kullanım Alanları
- Ark Kaynağı : Aynı anda tek bir parçayı kaynatır veya Fikstürsüz kaynak (Jigless Welding) işlemi yapar.
- Montaj: Büyük parçaların robotların birlikte hassas bir şekilde kaldırıp montajladığı sistemlerdir. Örneğin uçak kanatlarının montajları.
- Boya ve Kaplama : Parçanın tüm yüzeylerine erişim sağlayabilmek için kullanılır. Koordine bir şekilde boyama işlemi yapar.
Otomotiv, Ağır sanayi, Havacılık, Gemi İnşa, Metal İşleme, Tarım Makineleri gibi sektörlerde sıklıkla kullanılmaktadır.
Türkay Tarım a Yaptığımız Multimove Sistem
Sistemde 2 ABB Robot , 2 L tipi pozisyoner , 2 Fronius kaynak makinesi ve Beckhoff Endüstriyel PC kullanılmıştır. Sistem tarım makinesi şasi kaynağında kullanılmak üzere tasarlanmıştır. Tüm sistem müşterinin ihtiyacına göre dizayn edilmiştir. Robotlar hem Dual modda hemde Single modda çalışabilmektedir.
L tipi pozisyoner avareleri lineer kızaklara montajlanmıştır. Bu sayede bağlanılan parça 4 metreye kadar uzatıp kısaltılabilmektedir. Ayrıca pozisyonerlere yapmış olduğumuz 2. bir kızak – piston sistemi daha mevcuttur , bu ise parçayı hızlı bir şekilde çıkarıp takmak için tasarlanmıştır.
Robotlar tek bir flexpendant’tan yönetildiği için programlanması iki flexpendant a göre oldukça kolaydır. Robotlar senkronize şekilde çalışır, sürekli birbirlerini kontrol ederler. İş sırasında herhangi bir Safety , EMG veya mod değişikliğinde robotlar durur.